# Arquitetura de Eletrônica
Histórico de Versões
| Data | Responsável(eis) | Descrição | Versão |
|---|---|---|---|
| 26/04/2024 | Débora, Luiz e Maximiliano | Escrita da arquitetura de eletrônica | 1.0 |
| 04/05/2024 | Luiz | Escrita e imagens dos diagramas de blocos dos susbsistemas | 1.1 |
| 04/05/2024 | Felipe, Rafael e Luiz | Revisao do doumento | 1.2 |
| 05/05/2024 | Luiz | Inserção de tabelas, dados, imagens e texto | 1.3 |
| 05/05/2024 | Matheus Costa | Revisão e organização do documento | 1.4 |
| 10/07/2024 | Maximiliano e Luiz | Revisão e organização do documento | 1.5 |
Subsistemas
A seguir, é mostrado o funcionamento de cada subsistema do projeto eletrônico apêndice 3,bem como os componentes e módulos presentes e as interações com os outros subsistemas.
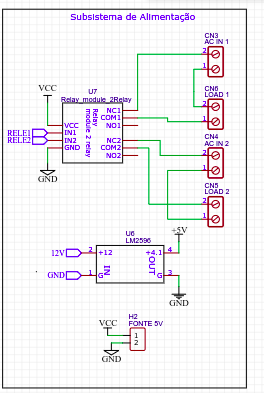
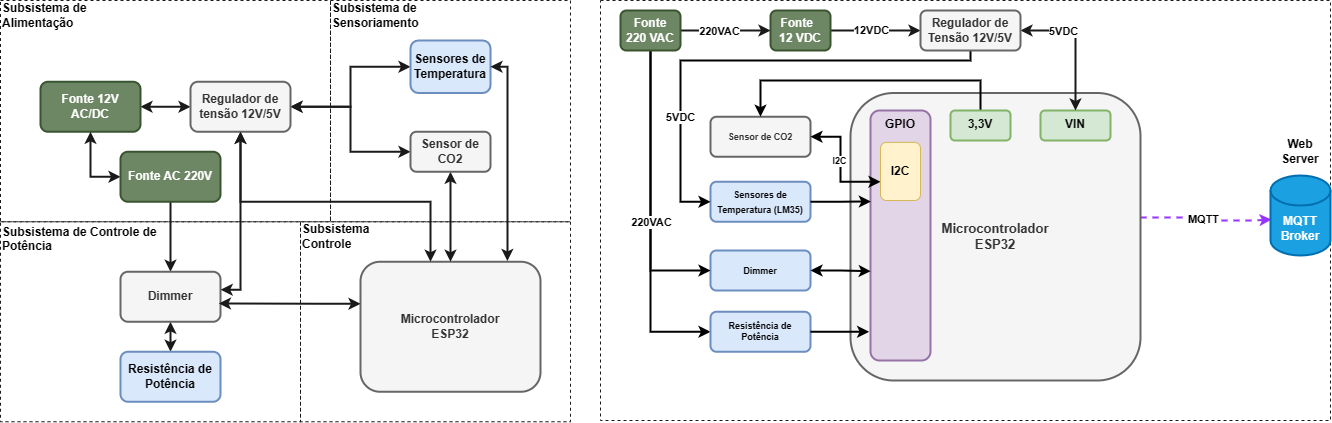
Subsistema Alimentação: O subsistema de alimentação tem como objetivo fornecer as tensões e correntes adequadas para todos os outros subsistemas do projeto. Seu funcionamento se baseia em uma fonte de 12VDC e corrente contínua de 1A. Este subsistema também possui uma regulador de tensão LM2596, reponsável por garantir uma tensão adequada para os atuadores, microcontroladores e sensores presentes no projeto. O subsistema também possui umrelé de 2 canais que conta com proteção e isolamento pelo fato de possuir um optoacopladores embutidos, esse relé será responsável por ligar e desligar a alimentação da fonte de corrente alternada de forma controlada a partir de pulsos enviados pelo microcontrolador.
Figura 1: Subsistema de Alimentação.
Fonte: Autor
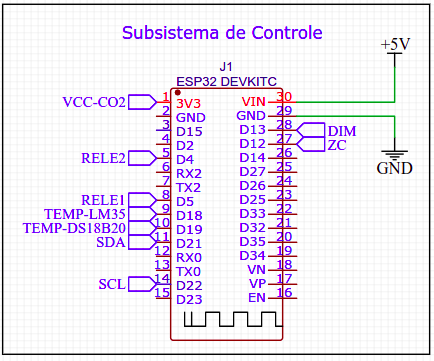
Subsistema de Controle: O subsistema de controle é responsável por gerenciar o sistema embarcado do projeto, além de receber comandos e enviar dados de temperatura e concentração de CO2 para o servidor web a patir do protocolo de comunicação MQTT. O funcionamento deste subsistema envolve o controle de potência com base na detecção de zeros na tensão AC e o acionamento do módulo dimmer para essa finalidade. Com o controle de potência adequado, é possível ajustar a temperatura usando o subsistema de sensoriamento, que fornece os dados de temperatura para esse subsistema. Esses dados permitem o ajuste preciso da temperatura do ar circulante dentro do silo esteja na faixa desejada.
Figura 2: Subsistema de Controle.
Fonte: Autor
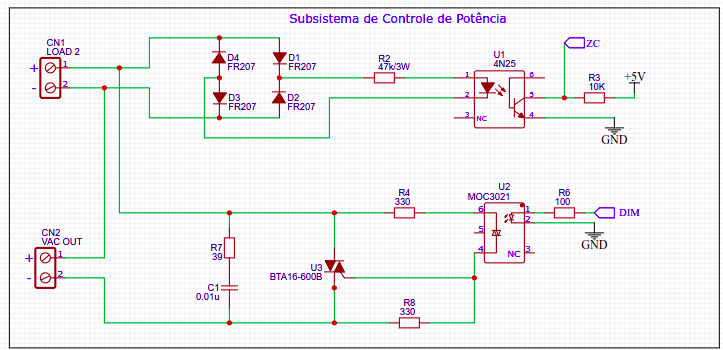
Subsistema de Controle de Potência: O subsistema de potência ajusta a potência dissipada da resistência por meio de ciclos de ligamento e desligamento, que são feitos a partir da integração entre os subsistemas de controle, sensoriamento e potência. O módulo dimmer presente neste subsistema detecta as passagens por zero da tensão de 220V AC da rede elétrica, envia pulsos ao ESP32 para sincronizar os ciclos de controle de temperatura. O subsistema de controle regula a duração desses ciclos, ajustando o tempo de ligamento e desligamento da resistência para manter a energia dissipada dentro de limites específicos. Esse processo também é influenciado pelo subsistema de sensoriamento, que fornece ao ESP32 os dados necessários para realimentar a malha de controle e, assim, regular a temperatura de forma adequada.
Figura 3: Subsistema de Controle de Potência.
Fonte: Autor
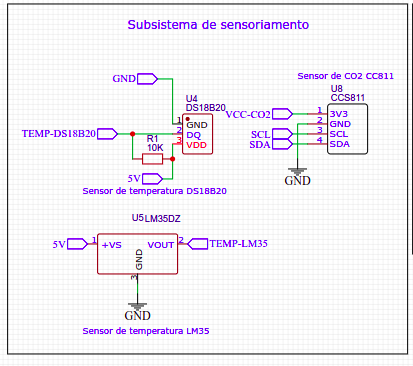
Subsistema de Sensoriamento: O subsistema de sensoriamento realiza medições periódicas da temperatura de saída da haste e da temperatura de grãos próximos à haste do silo a partir de sensores de temperatura LM35, além de medições de respirações dos grãos a partir de um sensor de C02, o MQ-135. Esses dados são enviados para o microcontrolador e, posteriormente, são enviados para o servidor web via protocolo MQTT.
Figura 4: Subsistema de Sensoriamento.
Fonte: Autor
Diagramas
Diagramas de barramentos de alimentação
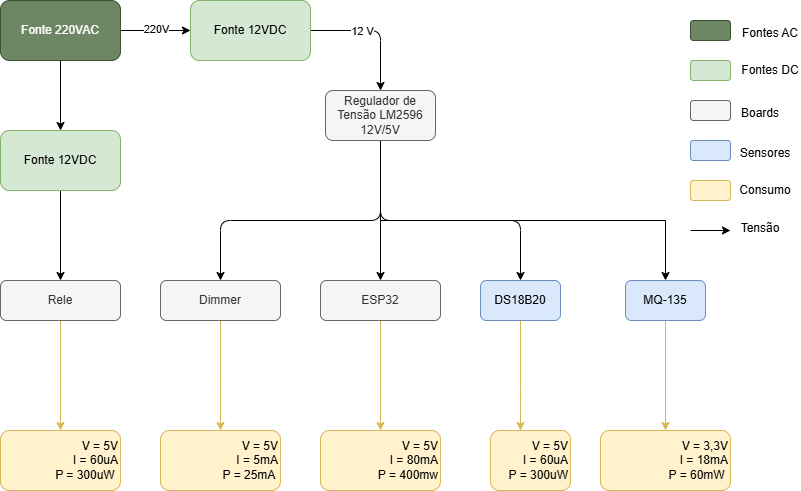
A Figura 5 mostra como são alimentados os componentes e módulos do projeto. A tensão da fonte de alimentação inicial é direcionada para o regulador de tensão, que a estabiliza em 12V DC. A tensão regulada alimenta os módulos, sensores e o dimmer. O sensor de CO2, devido à sua especificação de operação, requer uma tensão de 5V DC, portanto, é alimentado diretamente pelo regulador. O diagrama na Figura 5 mostra as informações sobre o consumo de tensão, corrente e energia de cada componente.
Figura 5: Barramentos de alimentação.
Fonte: Autor
Diagramas de barramentos e protocolos de comunicação
A Figura 6 detalha as conexões relativas aos barramentos dos pinos e os protocolos utilizados. A ESP32 é alimentada diretamente em seu pino vin, que permite entradas de tensão 5VDC. Os sensores são conectados diretamente aos pinos de GPIO usando a entrada ADC da ESP32, com exceção do sensor de CO2, o qual se comunica através dos pinos GPIO SDA e GPIO SCL, configurando-se como uma comunicação I2C. O módulo dimmer é alimentado pelo regulador de tensão e também se comunica com o microcontrolador através dos pinos de GPIO. A conexão com o servidor é estabelecida via conexão Wifi, utilizando o protocolo MQTT.
Figura 6: Diagramas de barramentos e protocolos de comunicação.
Fonte: Autor
Componentes selecionados para o projeto
Fonte Chaveada 12VDC e 10A
Fonte 12V e 10A, tem como finalidade alimentar os componentes eletrônicos do projeto silo, bem como fornecer uma corrente adequada para todo o sistema e sensores.
Figura 7: Fonte 12VDC 10A.

Fonte: Mercado Livre
Tabela 1: Características Fonte 12VDC.
| Característica | Valor/Descrição |
|---|---|
| Ajuste de Tensão de Saída | Sim (Trimpot) |
| Plug de Saída | P4 |
| Tensão de Entrada | 127 V ou 220 V (chave de Seleção) |
| Tensão de Saída (Vcc) | 12 V |
| Corrente de Saída (A) | 10 A |
| Potência | 120 W |
| Frequência | 50/60 Hz |
| Tolerância de Saída | ± 10% |
| Conexão de Saída | Borne com Parafuso |
| Conexão de Entrada | Borne com Parafuso |
| Peso Líquido | 307 g |
| Dimensões (L x A x P) | 37 x 98 x 130 mm |
Fonte: Mercado Livre
Mini Fonte 100/240VAC para 5VDC (HLK-PM01)
Fonte 12V e 600mA, tem como finalidade alimenta o relé de forma isolada, garantindo a segurança contra ruídos e interências na rede elétrica que podem afetar o microcontrolador.
Figura 8: Fonte 5V.

Fonte: HUINFINITO
Tabela 1: Características Fonte 12VDC.
| Característica | Valor/Descrição |
|---|---|
| Faixa de Entrada | 100 a 264 V AC |
| Frequência de Entrada | 50/60 Hz |
| Corrente Máxima de Entrada | <0,2 A |
| Tensão de Saída | +5 V DC ± 0,1 V |
| Corrente Máxima na Saída (Pico) | 1000 mA |
| Corrente Máxima na Saída (Longo Prazo) | 600 mA |
| Consumo de Energia sem Carga | <0,1 W |
| Temperatura de Operação | -20 ºC a +60 ºC |
| Confiabilidade a Longo Prazo (MTBF) | 100000 h |
| Dimensões | 34 x 20 x 15,5 mm |
| Peso | 21 g |
Fonte: HUINFINITO
Regulador de Tensão LM2596
O LM2496 é um regulador de tensão STEP-DOWN. Ele é reponsável por receber a tensão de entrada da fonte de alimentação principal, que pode variar entre 4.5V e 40V, no caso deste projeto, a fonte de 12V, e a converte em uma tensão de saída de 5V DC, que é suficiente para alimentar os diversos componentes eletrônicos do sistema, como microcontroladores, sensores e atuadores.
Figura 9: Regulador de Tensão LM2596.

Fonte: Mercado Livre
Tabela 1: Características do Regulador de Tensão LM2596.
| Característica | Valor/Descrição |
|---|---|
| Faixa de Tensão de Entrada | 4.5V a 40V |
| Tensão de Saída | 1.25V a 37V (ajustável) |
| Corrente de Saída Máxima | 3A |
| Eficiência | Até 92% |
| Frequência de Comutação | 150 kHz |
| Proteção contra Curto-Circuito | Sim |
| Proteção contra Sobrecarga | Sim |
| Temperatura de Operação | -40°C a +125°C |
Fonte: Datasheet LM2596
Microcontrolador ESP32-WRO0M32
O microcontrolador ESP32-WROOM32 foi selecionado para integrar o sistema eletrônico do silo, pois possui comunicação Wi-Fi e Bluetooth em um único chip, permitindo interfacear e enviar dados para o servidor externo. Esse micocontrolador também possui processador dual-core, sensores embutidos, pinos de entrada e saída, como GPIOs, I2C, SPI, UART, ADC e DAC. Essas características permitem a realizações das operações no sistema, o monitoramento de dados analógicos e o processamento de informações para o controle da temperatura no silo.
Figura 10: ESP32-WROOM32.
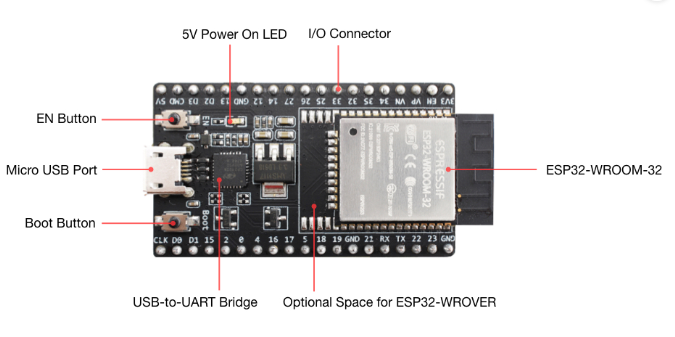
Fonte: ESPRESSIF
Tabela 2: Características ESP32-WR0OM32.
| Característica | Valor/Descrição |
|---|---|
| Comunicação | Wi-Fi, Bluetooth |
| Processador | Dual-core |
| Sensores embutidos | Sim |
| Pinagem | GPIOs, I2C, SPI, UART, ADC, DAC |
| Tensão de Operação | 3,3V ou 5V |
| Corrente de Operação | 80mA (típica) |
| Consumo de Energia | 400mW (típica) |
Fonte: ESPRESSIF
Sensor de qualidade do ar MQ-135
O sensor de qualidade do ar MQ-135 foi escolhido para detectar dióxido de carbono (CO2) e compostos orgânicos voláteis (COV) no ambiente interno do silo. Com uma faixa de medição de CO2 de 10 ppm a 1000 ppm, permitindo a monitoramento da respiração dos grãos. Sua utilização frequente em ambientes internos o torna adequado para o ambiente dos silos, onde variações irregulares de CO2 podem indicar condições anormais nos grãos armazenados.
O princípio de funcionamento do sensor MQ-135 baseia-se na tecnologia de sensor de óxido metálico (SnO2). Quando o sensor é ativado, o aquecedor embutido eleva a temperatura do material de óxido de estanho, promovendo uma reação com os gases alvo presentes no ambiente. Esta reação química altera a resistência elétrica do material, uma variação que é capturada e convertida em sinais analógicos. Esses sinais são então transformados em dados utilizáveis através de um circuito de medição simples. A resistência do sensor varia de acordo com a concentração dos gases, permitindo assim a detecção e medição da presença dos compostos. O sensor é robusto e possui uma vida útil longa, além de ser altamente sensível e ter uma resposta rápida. A comunicação com dispositivos externos pode ser facilmente implementada utilizando circuitos simples, tornando o MQ-135 uma solução eficiente e de fácil integração para monitoramento da qualidade do ar interno.
Figura 11: Sensor de CO2 MQ-135.

Fonte: HU Infinito
Tabela 3: Características MQ-135.
| Característica | Valor/Descrição |
|---|---|
| Faixa de Medição CO2 | 10 ppm a 1000 ppm |
| Tensão de Operação | 5V |
| Corrente de Operação | 150mA (ativa) |
| Consumo de Energia | 75mW (ativa) |
| Outras Características | Detecta CO2 e COV |
Fonte: Datasheet MQ-135
Sensor DS18B20
Sensor de Temperatura DS18B20
O sensor de temperatura DS18B20 é um dispositivo digital capaz de medir a temperatura com alta precisão. Ele pode ser operado por diversos microcontroladores, incluindo a ESP32. No caso deste projeto, o sensor DS18B20 será usado para monitorar a temperatura do ambiente.
Figura 12: Sensor de Temperatura DS18B20.

Fonte: LOJA DA ROBÓTICA
Tabela 6: Características do Sensor de Temperatura DS18B20.
| Característica | Valor/Descrição |
|---|---|
| Tensão de Operação | 3.0V a 5.5V DC |
| Faixa de Temperatura | -55°C a +125°C |
| Precisão | ±0.5°C (de -10°C a +85°C) |
| Interface de Comunicação | 1-Wire |
| Resolução de Medição | 9 a 12 bits configurável |
| Tempo de Conversão | 750 ms (12 bits de resolução) |
| Tolerância de Corrente | 1 mA durante a conversão |
Fonte: Datasheet DS18B20
Resistência de Potência
A resistência de potência de 3600W para dissipação de energia em forma de calor para que a haste consiga fornecer ar quente para o silo.
Figura 13: Figura ilustrativa da resitência que será utilizada.

Fonte: SHOPPE
Tabela 7: Características da Resistência de Potência .
| Característica | Valor/Descrição |
|---|---|
| Tensão de Operação | 220VAC |
| Consumo de energia | 3600W |
Fonte: SHOPPE
Projeto de Eletrônica
Projeto do Subsistema de Alimentação
O subsistema de alimentação foi projetado para fornecer energia a todo o projeto embarcado. Ele é composto por uma fonte chaveada de 12V e 10A, conectada a um regulador de tensão step-down, que converte a tensão para 5V. Essa tensão de 5V é utilizada para alimentar o microcontrolador ESP32, bem como outros componentes de diversos subsistemas.
Especificamente, a tensão de 5V regulada pelo LM2596 é utilizada para alimentar o sensor de CO2 MQ-125. Além disso, a ESP32 fornece energia para módulos adicionais, como o sensor de temperatura DS18B20. A tensão de 5V também é utilizada no circuito detector de passagem por zero (Zero Cross), onde alimenta um resistor de pull-up. A imagem a seguir mostra como as fontes foram dispostas no quadro de energia.
Essa configuração assegura uma distribuição eficiente e confiável de energia, permitindo o funcionamento adequado de todos os componentes do sistema embarcado.
Figura 14: Projeto da fonte de alimentação de 5V e regulador de tensão.
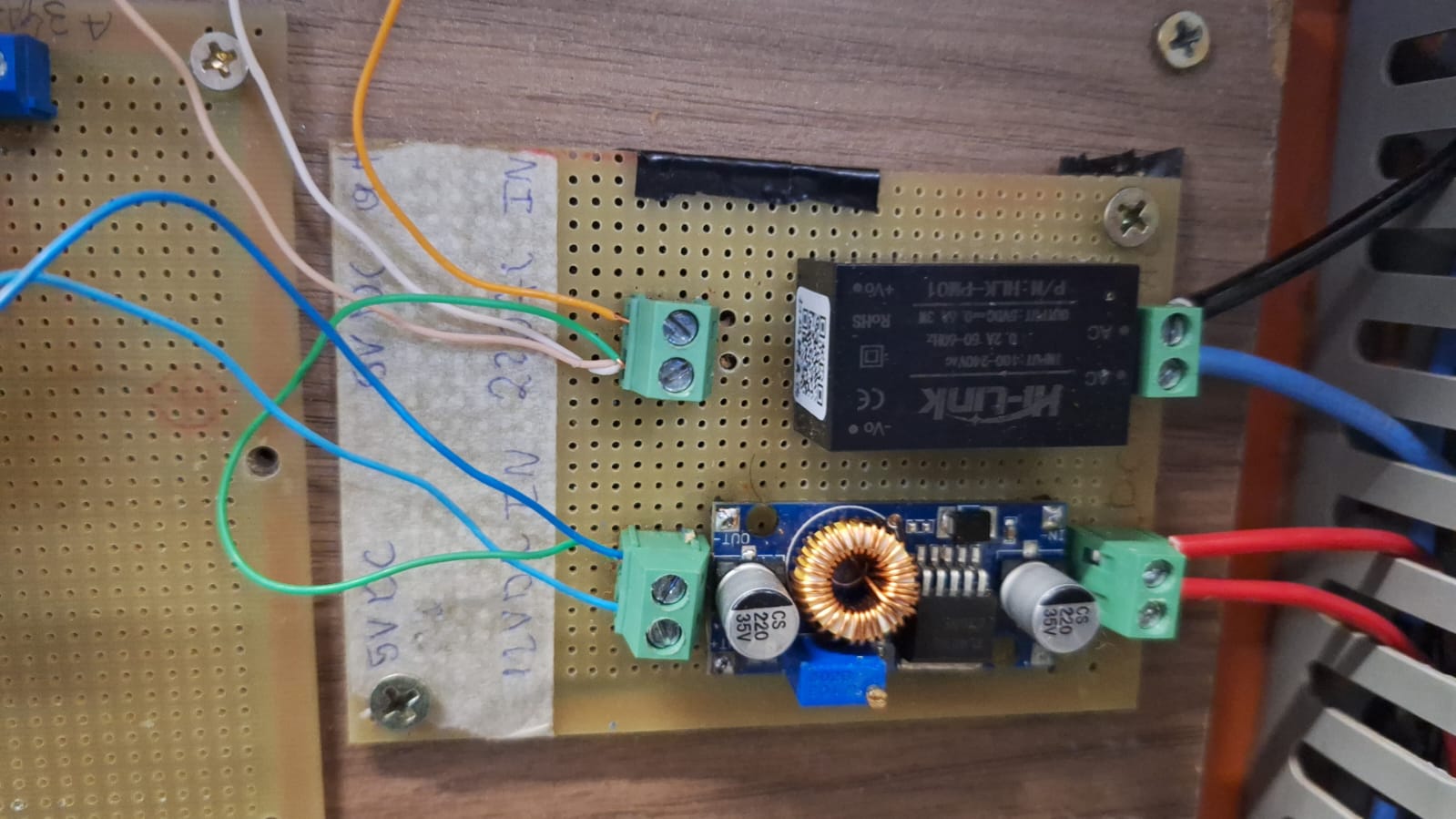
Fonte: Autor
Figura 15: Projeto da fonte chaveada.
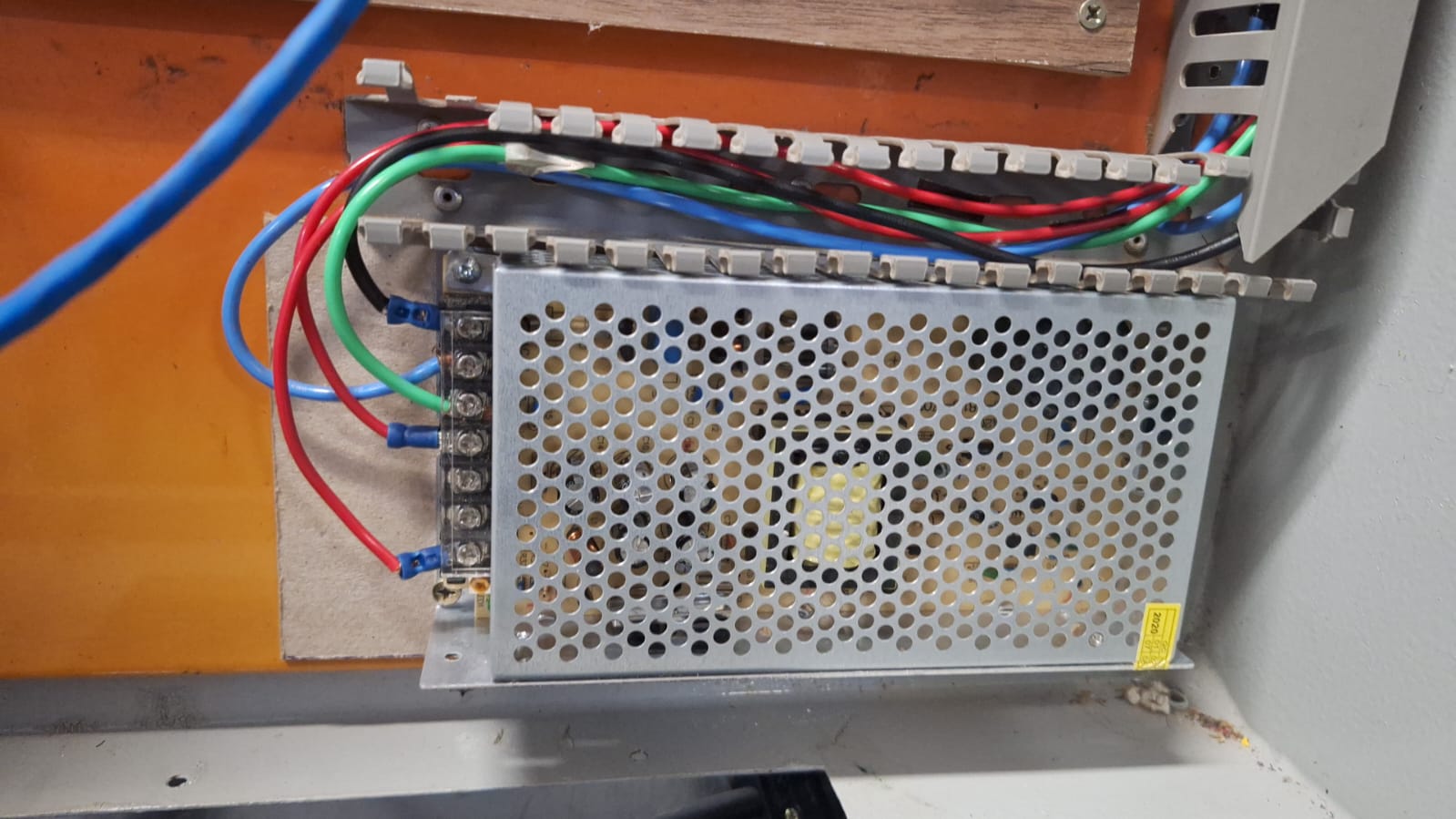
Fonte: Autor
Projeto do Subsistema de Controle
O subsistema de controle funciona como circuito de controle do sistema embarcado, consistem em uma ESP32 e um resistor de 4.7K, o resistor de 4.7kΩ conectado entre o Vcc (3.3V) e o Vout do sensor de temperatura DS18B20 serve como um resistor de pull-up. Esse resistor é necessário para o correto funcionamento da linha de dados do sensor em um sistema de comunicação de um fio (1-Wire). Nas imagens a seguir é mostrado como foram realizadas as conexões, conforme o esquemático do apêndice 3.
Figura 15: Projeto do Subsistema de Controle
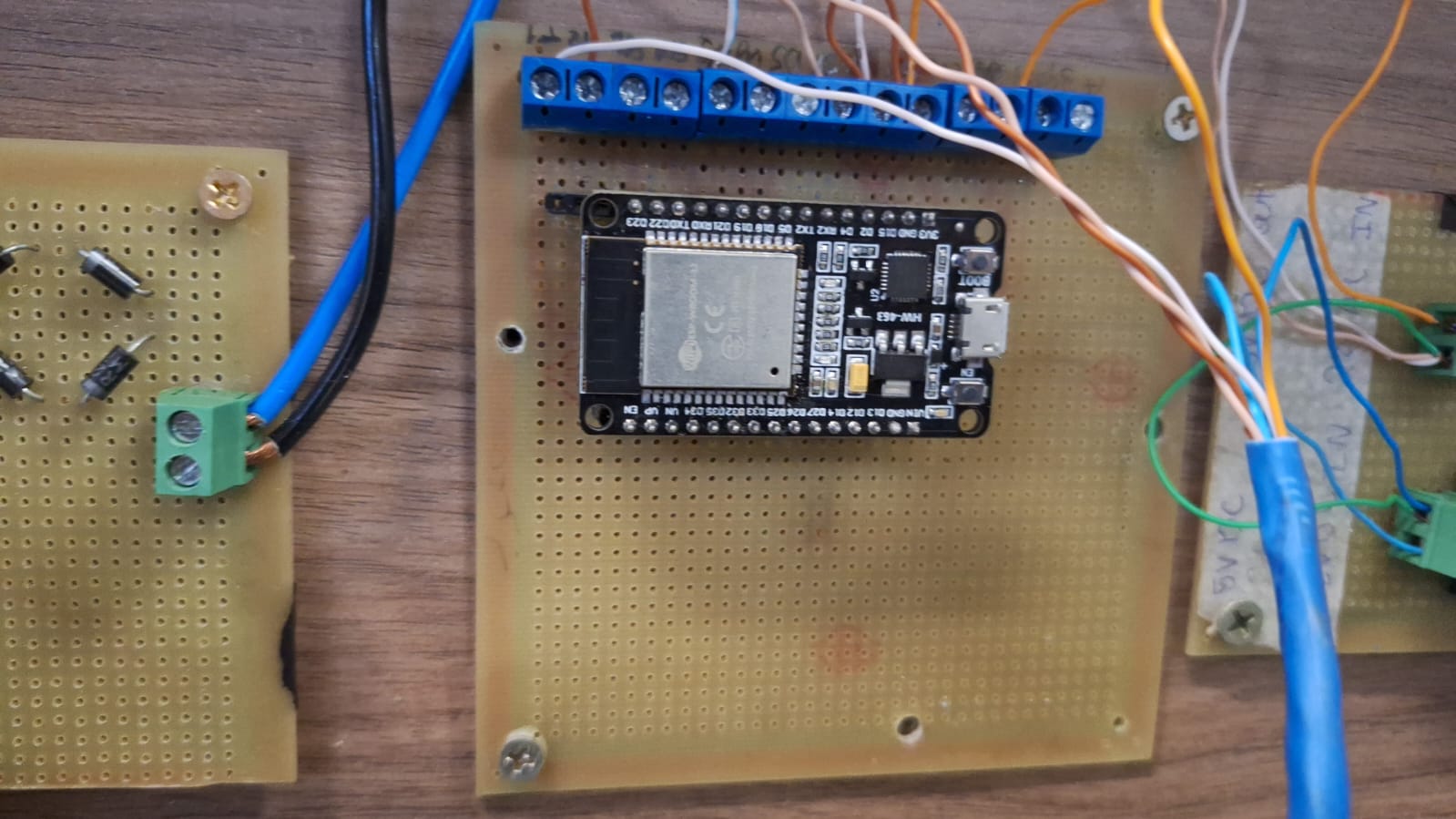
Fonte: Autor
Figura 16: Projeto do Subsistema de Controle
Fonte: Autor
Projeto do Subsistema de Sensoriamento
O subsistema de sensoriamento é composto por dois sensores: o DS18B20 e o MQ-135, que monitoram a temperatura e a concentração de CO2, respectivamente.
-
Sensor de Temperatura DS18B20: Este é um sensor digital que possui internamente conversores A/D, permitindo a conversão do sinal analógico para digital de forma autônoma, sem depender do microcontrolador. Isso facilita a obtenção de dados precisos de temperatura pelo microcontrolador.
-
Sensor de CO2 MQ-135: Este sensor utiliza o conversor A/D interno do microcontrolador ESP32 para converter os sinais analógicos de concentração de CO2 em dados digitais que são enviados para processamento.
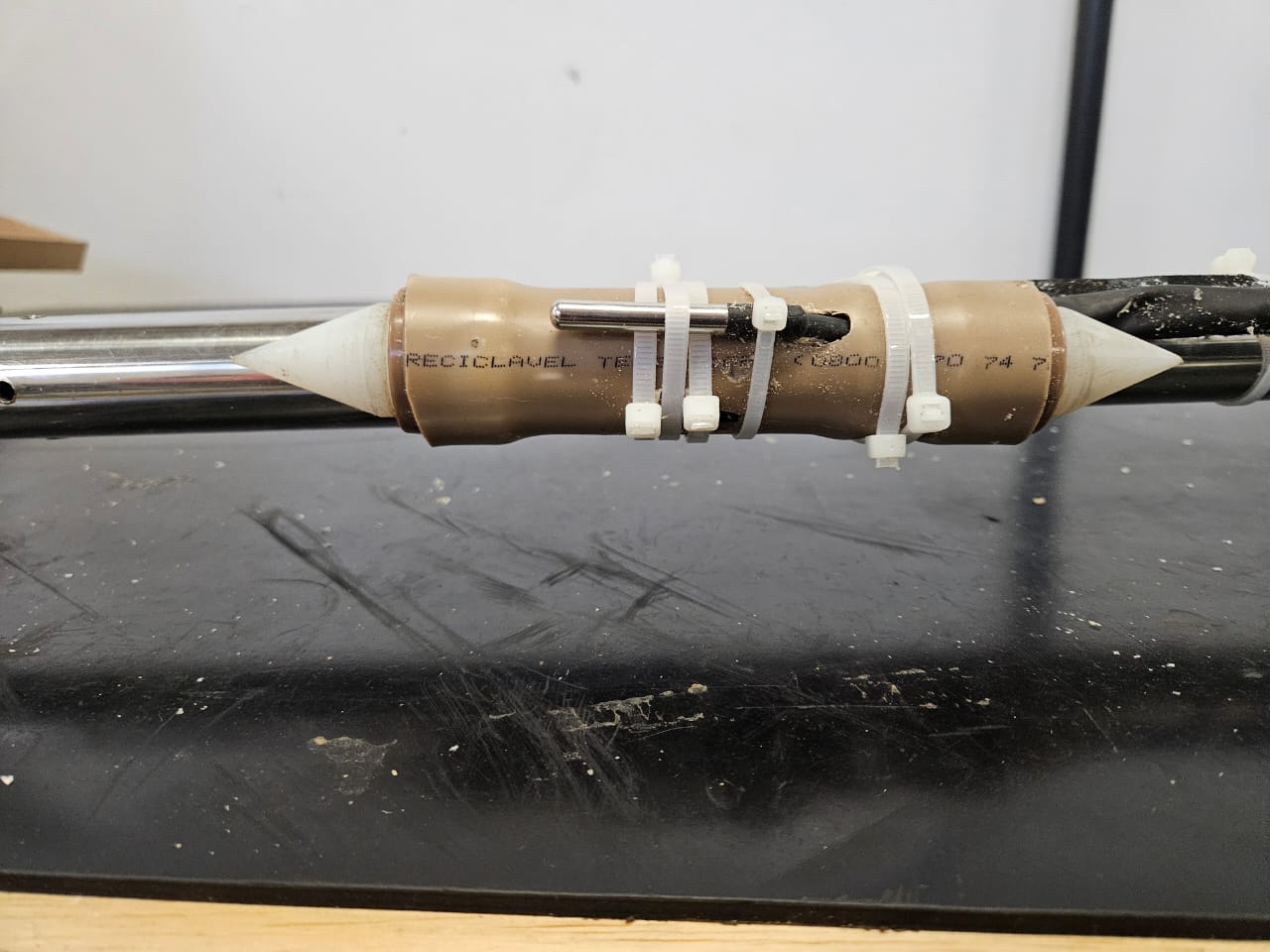
Na imagem a seguir, é possível ver o sensor de temperatura DS18B20 integrado na haste de sensoriamento. Internamente, a haste abriga o sensor de CO2 MQ-135. Externamente, é possível visualizar o sensor DS18B20, permitindo o monitoramento eficiente de temperatura e CO2 em um único módulo.
Figura 17: Projeto do Circuito Controlador de Potência.
Fonte: Autor
Projeto do Subsistema de Potência
O projeto consistiu no desenvolvimento de um controlador de potência usando tiristor. Para isso, foi desenvolvido o seguinte circuito para fazer o controle de potência de cargas de até 16A. A modulação da potência na carga pode ser calculada utilizando a equação de potência em um TRIAC. Como a carga que fará o aquecimento do silo é puramente resistiva, é possível calcular a potência pela seguinte equação:
\(P = \frac{V_{\text{rms}}^2}{R} \cdot \left(\frac{1}{\pi} (\pi - \alpha) + \frac{\sin(2\alpha)}{2}\right)\)
Onde: - \(V_{\text{rms}}\) é a tensão eficaz da fonte de alimentação AC. - \(R\) é a resistência da carga. - \(\alpha\) é o ângulo de disparo do TRIAC, medido em radianos.
Essa formula pode ser aproximada seguindo a equação do fabricante, no qual é possivel gerar uma tabelo loockup para mapear os valores de potência desejado, de acordo com o angulo de fase da tensão AC.
Para um TRIAC controlando uma carga resistiva, a potência média \((P_{\text{avg}}\) como fração da potência máxima \(P_{\text{max}}\) pode ser expressa como:
\(\frac{P_{\text{avg}}}{P_{\text{max}}} = \frac{1}{2\pi} \int_{\alpha}^{\pi} \sin^2(\theta) d\theta\)
Simplificando a integral, obtemos:
\(\frac{P_{\text{avg}}}{P_{\text{max}}} = \frac{1}{2} \left(1 + \cos(\alpha)\right)\)
Portanto, a potência média \(P_{\text{avg}}\) pode ser escrita como:
\(P_{\text{avg}} = P_{\text{max}} \cdot \frac{1}{2} \left(1 + \cos(\alpha)\right)\)
Onde: - \(P_{\text{max}}\) é a potência máxima que seria entregue à carga se o TRIAC estivesse conduzindo durante todo o ciclo. - \(\alpha\) é o ângulo de disparo do TRIAC, medido em radianos.
O projeto deste controlador de potência envolve a utilização de um circuito detector de passagem por zero para sincronização com a rede elétrica. Ao detectar a passagem por zero, o circuito envia um sinal de interrupção ao controlador, permitindo a sincronização dos sinais enviados ao TRIAC com as passagens por zero da rede elétrica.
Descrição do Circuito
- Detector de Passagem por Zero:
- Ponte de Diodos: Converte a onda senoidal da rede elétrica em uma forma de onda retificada, neste caso, mantém a rede com uma frequência de 120Hz é periodo de 8,3ms.
- Resistor de 47kΩ 3W: Reduz a corrente que circula pelo circuito, protegendo os componentes subsequentes.
-
Fotoacoplador 4N25: Isola eletricamente o circuito de detecção do controlador e envia o sinal de interrupção quando a passagem por zero é detectada.
-
Circuito do TRIAC:
- Fototriac: Aciona o TRIAC BTA16 de acordo com o tempo determinado pelo sistema de controle PID.
- TRIAC BTA16: Controla a potência entregue à carga com base nos sinais do fototriac.
- Resistores Limitadores de Corrente (330Ω): Conectados nos pinos 1, 2 e 3, protegem os componentes ao limitar a corrente.
- Filtro Snubber: Composto por um resistor de 39Ω e um capacitor de 0.01μF, é conectado em paralelo ao TRIAC para evitar disparos acidentais causados por ruídos na rede elétrica.
Funcionamento
- Detecção e Sincronização:
- O circuito detector de passagem por zero identifica o ponto de cruzamento da onda senoidal por zero e envia um sinal de interrupção ao controlador.
-
Com esse sinal, o controlador sincroniza os pulsos de disparo do TRIAC com a frequência da rede elétrica, garantindo controle preciso da potência.
-
Controle do TRIAC:
- O fototriac, ativado pelo controlador, dispara o TRIAC BTA16 conforme o tempo calculado pelo sistema PID.
- O filtro snubber protege o TRIAC de ruídos elétricos que poderiam causar disparos indesejados.
Figura 18: Circuito de Controlador de Potência.
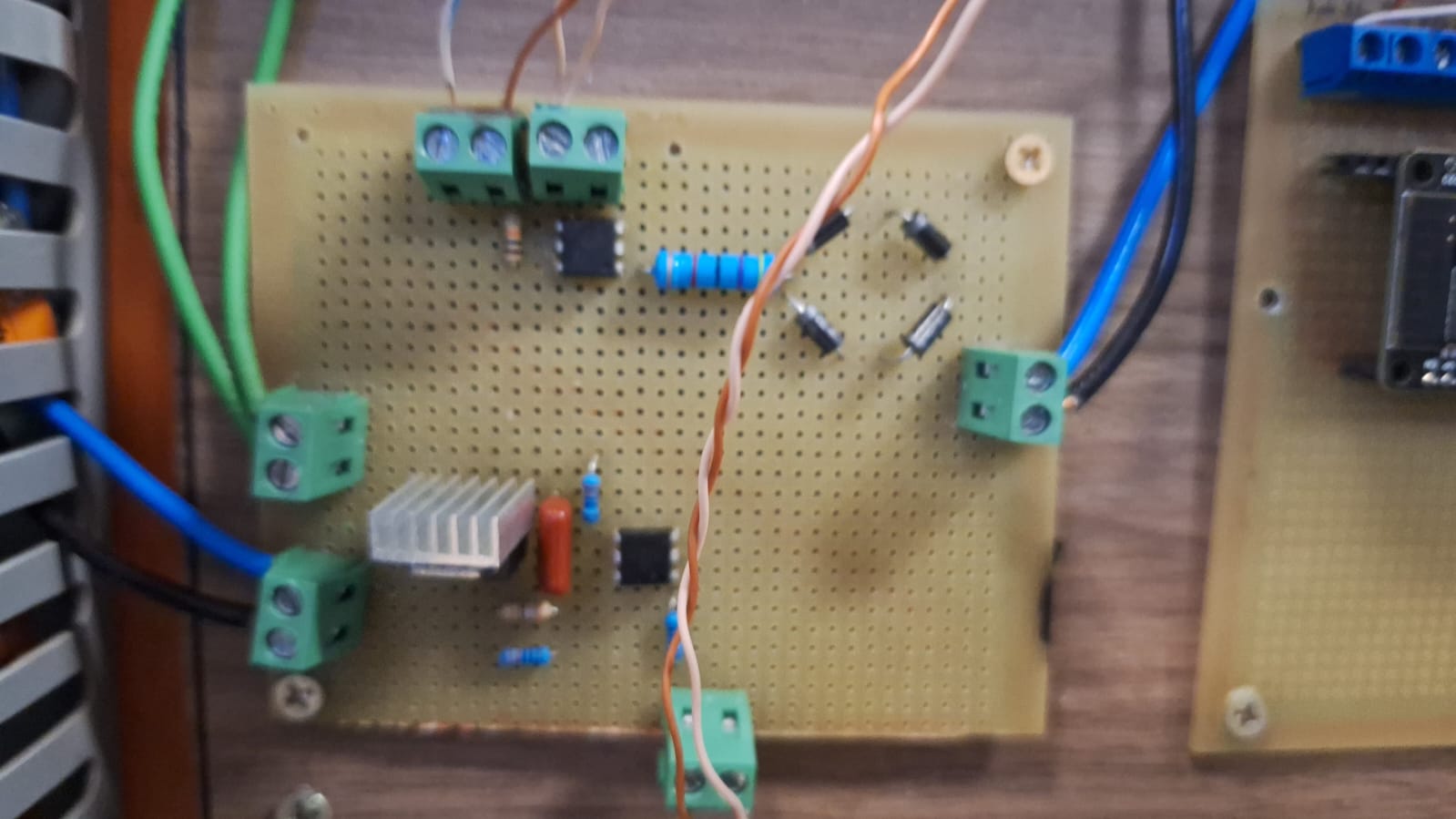
Fonte: Autor
Placa de Circuito Impresso
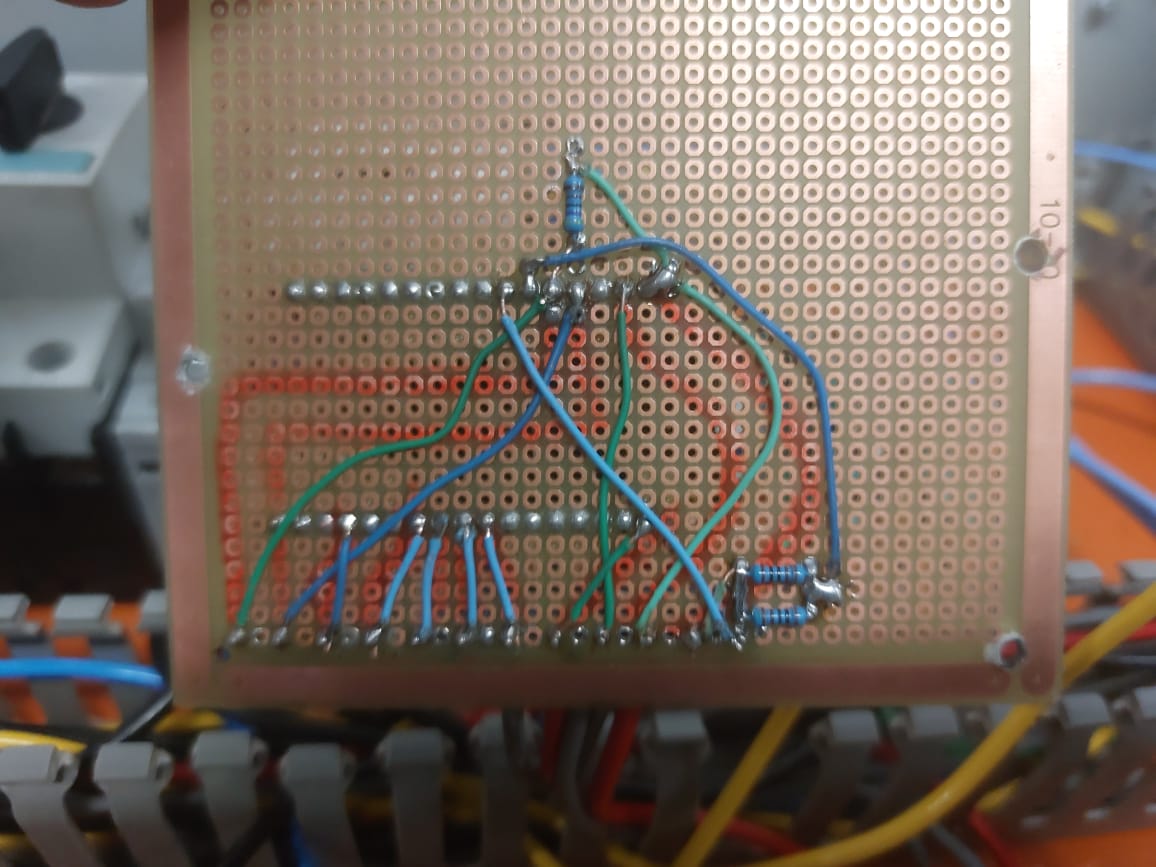
Com a integração dos subsistemas de controle, potência e sensoriamento, foi possível desenvolver uma PCB compacta o suficiente para integrar boa parte dos componentes do projeto, além de realizar as interconexões dos módulos externos. A figura a seguir mostra como ficou o layout, esquemático e visualização 3D da PCB desenvolvida.
Figura 19: Figura ilustrativa da parte frontal da PCB desenvolvida.
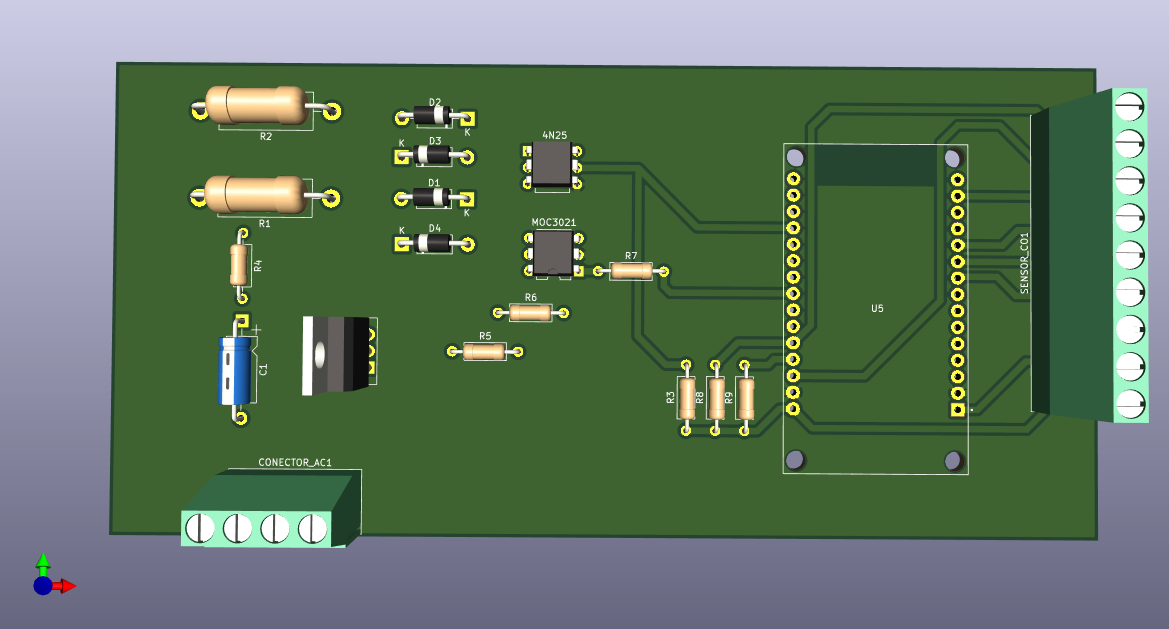
Fonte: Autor
Figura 20: Figura ilustrativa da parte traseira da PCB desenvolvida.
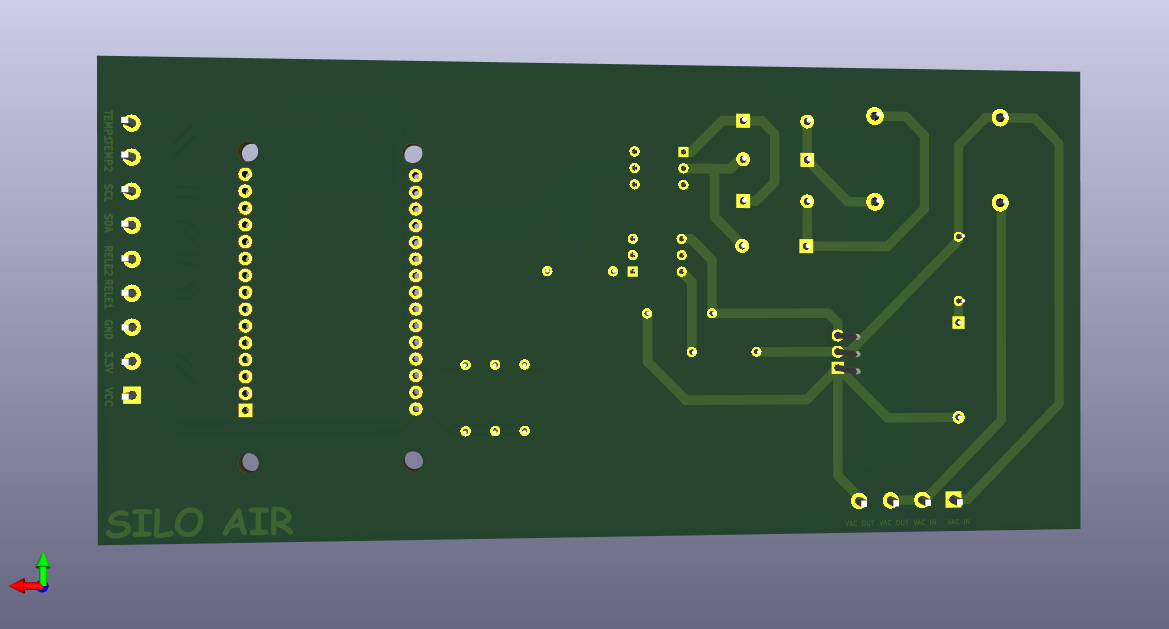
Fonte: Autor